はじめに
さっそく質問ですが、みなさん逆FFTって使っていますか?
音響関係の信号処理をしている方なら逆FFTは毎日のように使用している方が多いと思います。
しかし、振動関係では逆FFTを使用している方はあまりいないですよね。
本記事では、初心者向けにFFTと逆FFTの関係を説明し、伝達関数を逆FFTするとどうなるのかを説明致します。
FFTと逆FFTの関係
ここでは、FFTと逆FFT(IFFT:Inverse Fast Fourier Transform)の大まかな関係を説明します。
FFTをブロック線図形式で表すと図1のような関係で示すことができます。

図1 FFTのブロック線図
逆FFTのブロック線図を図2に示します。図1のFFTとは逆の変換をしていることがわかります。

図2 IFFTのブロック線図
MATLABでの検証
ここで、簡単にMATLABで検証してみましょう。
下記の波形1と波形2が一致していれば、図1と図2の関係は成立していることが確認できます。
波形1:任意の信号(ランダム波)
波形2:波形1をFFTした後に、逆FFTした信号
結果は図3のようになります。
波形1が青、波形2が赤で示してあります。上の図を拡大したものが中央の図です。波形1と波形2が一致していますね。
波形1と波形2の差分が一番下の図です。0になっていることがわかります。
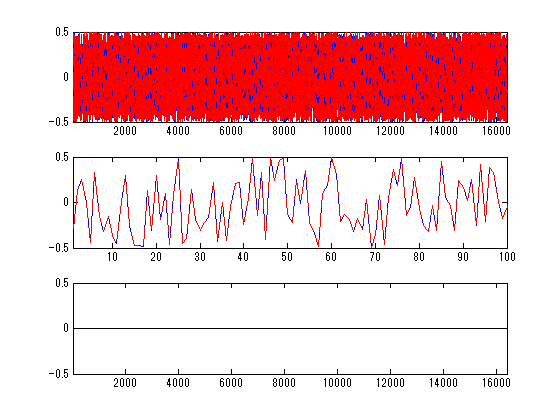 図3 検証結果
図3 検証結果
clear all;clc;close all N=2^14; sig1=rand(1,N)-0.5; SIG1=fft(sig1,N); sig2=ifft(SIG1,N); figure subplot(311) plot(sig1,'b') hold on plot(sig2,'r--') xlim([1 N]) subplot(312) plot(sig1,'b') hold on plot(sig2,'r--') xlim([1 100]) subplot(313) plot(sig1-sig2,'k') ylim([-0.5 0.5]) xlim([1 N])
伝達関数を逆FFTすると?
結論から述べると、伝達関数を逆FFTするとインパルス応答になります。
まあ、ハンマリング試験の時にインパクトハンマーで叩いて応答を測定しているので、「インパルス応答になるでしょ!」って思っていた人もいるかもしれませんね。
ただ、伝達関数の測定方法はいろいろな方法がありますよね。振動関連だと下記があげられます。どんな測定方法で取得した伝達関数でも逆FFTするとインパルス応答に戻るんですよ。
- インパクトハンマーによる打撃加振
- 加振機を用いた加振試験
→加振機への入力信号は様々(スイープ、ランダムなどなど)
MATLABでの検証
では、MATLABで検証してみましょう。
5自由度のバネマス系でFRFを作成し、そのFRFを逆FFTしてみます。
このとき、MATLABのような理論解では減衰行列Cを適切に設定しないと、逆FFTの検証がうまくいかないので注意してください。(うまくいかない理由については、ここで説明はしません。)
MATLABの検証結果が図4です。
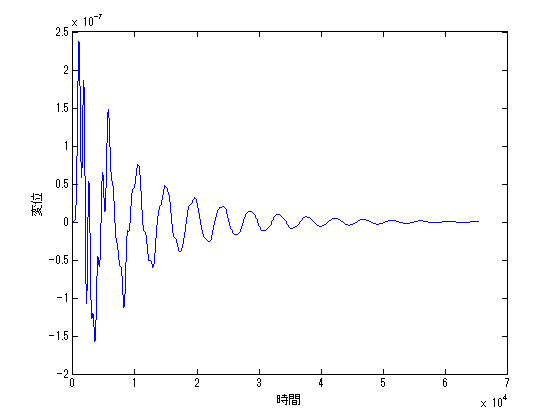 図4 FRFを逆FFTして求めたインパルス応答
図4 FRFを逆FFTして求めたインパルス応答
上記検証に用いたMATLABコードでわからない点がある方は、まずは下記リンクで勉強してみてください。FFTの結果がナイキスト周波数を基点に虚像となっている点についての理解が不足している可能性があります。

ここで触れた内容はifftの入り口にすぎません。もっと深い使い方があるので、次からはもう少し深い内容について解説していきます。
ifftが使いこなせると、振動・騒音・音響関連で研究や仕事をしている方は、これまで解けなかった課題が簡単に解けるようになります。
MATLABコード
実行ファイル
clear all
close all
% % % % 初期設定
freq=[0.0001 1:1:2^15-1];
m_vec=ones(1,5)*0.1;
[M]=eval_Mmatrix(m_vec);
k_vec=ones(1,5)*10^4;
[K]=eval_Kmatrix(k_vec);
a=10^1;
b=10^-4;
C=a*M+b*K;
F1=zeros(length(m_vec),length(freq));
F1(1,:)=ones(1,length(freq));
% % % % 変位X(ノイズなし)
X1=eval_direct_x_2ndedition(M,K,C,F1,freq);
% % % % 理想的なFRF
FRF_x4_f1=X1(4,:)./F1(1,:);
% % % % % FRFの確認
% figure
% semilogx(freq, abs(FRF_x4_f1),'k')
% hold on
% semilogx(freq, real(FRF_x4_f1),'b')
% semilogx(freq, imag(FRF_x4_f1),'r')
% % % % FRFを鏡面
FRF=[FRF_x4_f1 0 conj(FRF_x4_f1(end:-1:2))];
sig=ifft(FRF,2^15*2);
figure
plot(real(sig))
xlabel('時間')
ylabel('変位')
functionファイル
function x=eval_direct_x_2ndedition(M,K,C,F,freq) % % 2021.05.28 Fを修正 x=zeros(size(F,1),length(freq)); j=sqrt(-1); for ii1=1:1:length(freq) w=2*pi*freq(ii1); x(:,ii1)=inv(K+j*w*C-w^2*M)*F(:,ii1); end end
function [K]=eval_Kmatrix(k_vec) K=zeros(length(k_vec)); for ii1=1:length(k_vec) if ii1==1 K(ii1,ii1)=k_vec(ii1); else K(ii1-1:ii1,ii1-1:ii1)=K(ii1-1:ii1,ii1-1:ii1)+[1 -1;-1 1]*k_vec(ii1); end end end
function [M]=eval_Mmatrix(m_vec) M=diag(m_vec); end

コメント